


Cameras and LiDAR have long defined the drone sensing stack — but radar, the only sensor that operates reliably across all weather and lighting conditions, has remained out of reach for most UAV platforms. RVS Lab set out to change that.
BACKGROUND
Why Radar Has Been Missing From Drones
Mounting radar on drones has historically been impractical. Airborne AESA radars designed for fixed-wing aircraft and helicopters are expensive, high-performance systems engineered to detect targets at long range — far beyond what a small unmanned aerial vehicle actually requires. The result: the drone industry defaulted to cameras and LiDAR for close-range sensing.
RVS Lab took a different approach. By leveraging lightweight, automotive-grade mmWave FMCW MIMO radar — the same sensor class used for advanced driver assistance in passenger vehicles — the team developed a sensing solution capable of detecting objects, aerial vehicles, and terrain features within several hundred meters. Crucially, this is achieved at a cost and weight profile that is genuinely compatible with UAV integration.
TEST CONFIGURATION
Forward-Mounted Radar for Obstacle and Terrain Detection
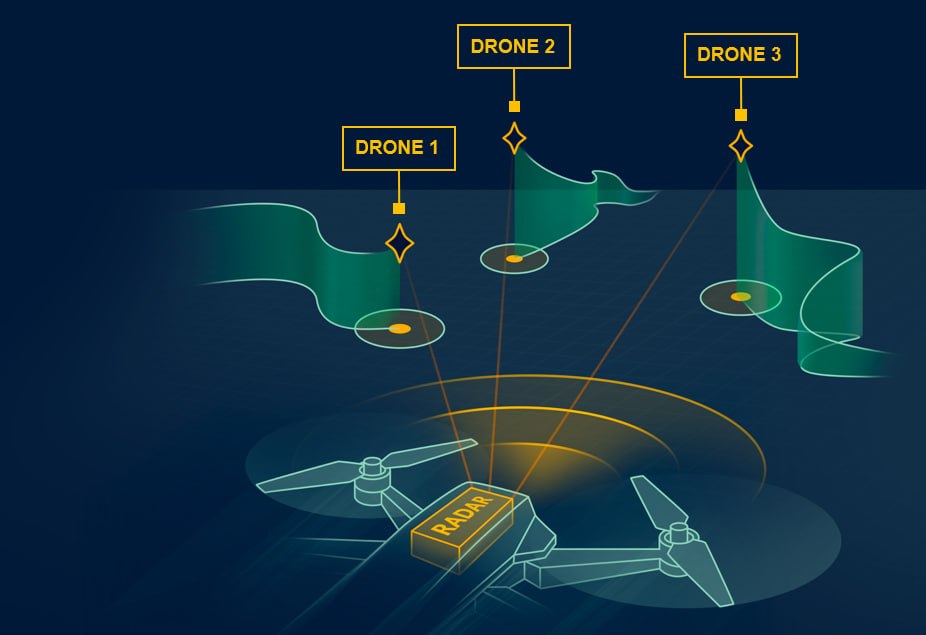
In RVS Lab’s initial drone radar test campaign, a vehicle-class radar unit was mounted on a drone facing the direction of travel. The test objectives were threefold:
- Forward obstacle and UAV detection: Detect obstacles and other aerial vehicles in the forward flight path in real time.
- Sub-flight terrain mapping: Identify terrain features directly below the flight path using radar returns from the ground.
- Algorithm validation: Validate RVS Lab’s custom DSP and PNTA algorithms under real flight conditions.
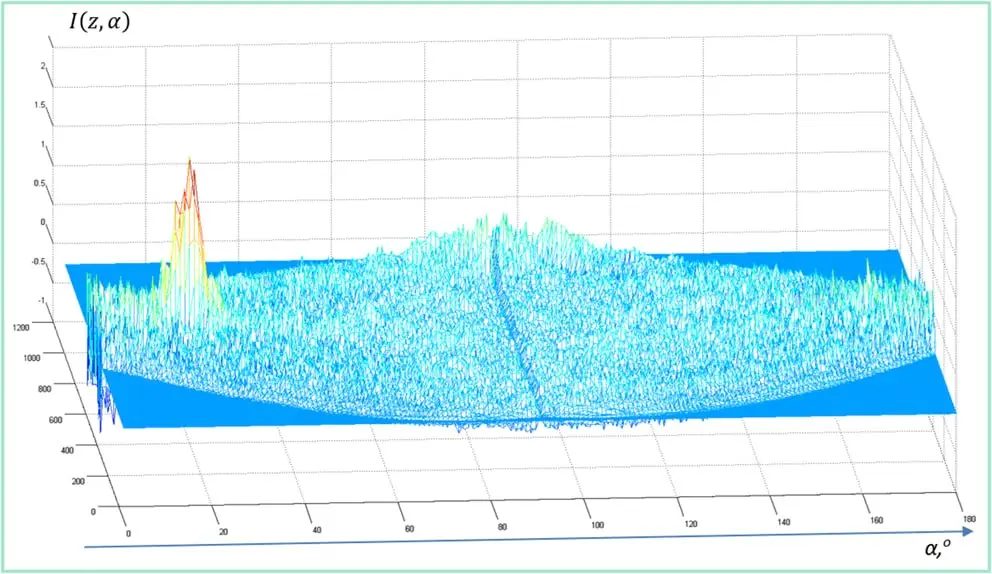
To enable this, RVS Lab applied a purpose-built software stack that combines two complementary algorithms. The first is a proprietary DSP algorithm that detects and tracks objects in the forward field of view faster and with greater accuracy than standard radar signal processing. The second is the PNTA algorithm, which suppresses noise and constructs precise object data for the terrain region directly beneath the drone’s flight path — enabling reliable ground mapping even at altitude.
The combined DSP + PNTA software stack enables real-time detection of drones and obstacles in the flight path, while simultaneously generating a radar map of the ground terrain below — all from a single, lightweight automotive radar unit.
CORE TECHNOLOGIES
SLAM, DAS, and Sensor Fusion: Building the Full Awareness Stack
The drone radar test served as the foundation for a broader set of sensing technologies that RVS Lab is developing under the Drone Awareness System (DAS) framework — a suite of specialized radars, software algorithms, and integration technologies designed to ensure safe UAV flight in complex environments.
Radar SLAM / Micronavigation
Estimating movement between adjacent radar frames and the vehicle’s orientation in space is very difficult using only radar detections. RVS Lab developed a solution based on raw signal correlation.

Drone Awareness System (DAS)
DAS technology is designed to significantly expand the sensor’s field of view, providing coverage not only in front of the drone but also behind and above it. Key developments include:
- Minimal-overlap antenna array
- Cross-radar tracking
- Low-SNR target detection


