


Shenzhen, China — May 2026 — RVS Lab and CHUHANG Technology GmbH jointly presented a research paper at the 2026 IEEE MTT-S International Wireless Symposium (IWS 2026), held in Shenzhen, China, as part of 2026 China Microwave Week. The 13th installment of the conference series is one of the world’s most prominent international forums for advances in components, circuits, and systems related to existing and emerging wireless technologies, drawing 541 paper submissions from 16 countries and regions this year, with 402 ultimately accepted for presentation.
The jointly authored paper, titled “Validation of Probabilistic Nested Trajectory Analysis (PNTA) for Resolution Improvement of a 4D Millimeter-Wave Radar in SLAM,” presents the first results of the inaugural collaborative research program between RVS Lab and CHUHANG. The work was conducted as a direct follow-up to the comprehensive cooperation Memorandum of Agreement (MOA) signed by the two companies in November 2025, and its presentation at IWS 2026 marks the first public disclosure of outcomes from the partnership.
About the Research
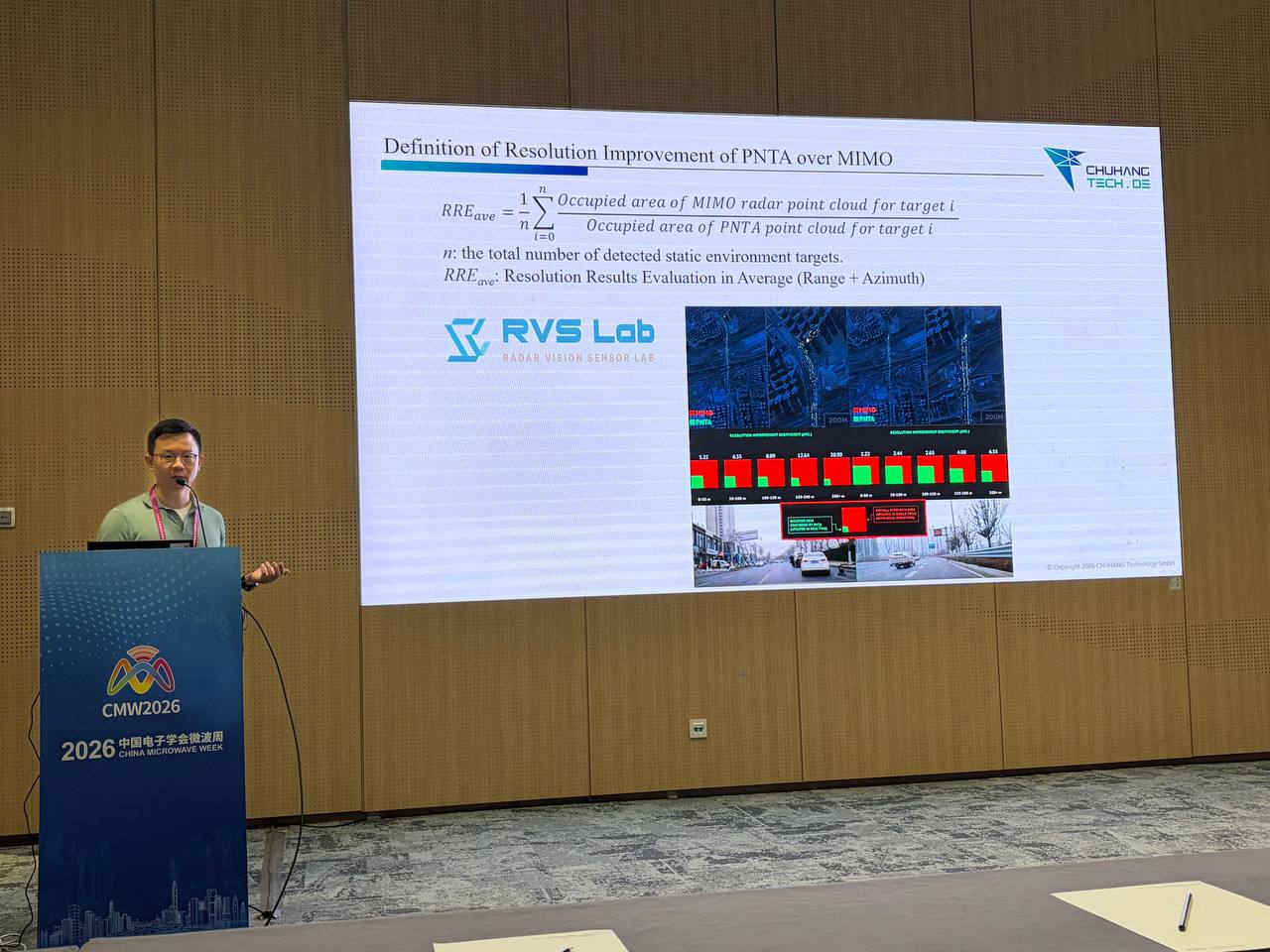
The paper reports real-time experimental validation of the Probabilistic Nested Trajectory Analysis (PNTA) algorithm applied to a conventional 4D multi-input multi-output (MIMO) millimeter-wave imaging radar mounted on a test vehicle, targeting simultaneous localization and mapping (SLAM). Unlike conventional MIMO processing, PNTA spatially accumulates signals along the platform’s trajectory, effectively forming a virtual distributed antenna and extending radar resolution beyond its hardware design limits.
Key findings from on-vehicle tests conducted under random urban driving conditions include:
- 2 to 20 times resolution improvement over conventional MIMO point clouds, with the largest gains observed at longer detection ranges.
- A fully functional SLAM system implemented using PNTA-derived point clouds alone, without reliance on IMU or GPS inputs.
- A positional drift of approximately 10 meters per minute, verified offline against Google Maps reference data — an acceptable level for proof-of-concept demonstration, with significant improvement expected once IMU/GPS data is fused in practical deployments.
These results position PNTA as a promising software-defined pathway to radar performance enhancement, particularly compelling in an era where AI-driven compute platforms have made algorithmic complexity far less of a constraint than in the past.
Strengthening International Collaboration
IWS 2026 provided a valuable platform for RVS Lab and CHUHANG to introduce their joint radar technology to wireless experts from China and around the world. The successful presentation reinforces the partnership established under the November 2025 MOA and sets the stage for continued collaboration on next-generation radar perception technologies for autonomous driving and beyond.

